为营造学术氛围,提升研究生的学术兴趣,学院采取“学生主体性”与“教师主导性”相结合的培养模式,组织学生进行学术交流汇报。于5月17日下午2点在机械馆414-3顺利举办第二届研究生学术交流会的第二场活动。本次学术交流会由研究生胡安琪主持,副院长王传云老师参会并作点评。
本次学术交流会由叶长龙老师团队和张森悦老师团队指导的研究生进行学术汇报。

项知禹同学汇报的题目为“自适应协作”,他首先通过现实世界中人类工作时遇到的问题引出了自适应协作的基本知识,随后分享了自适应协作的基本符号和算法,并介绍了复杂的自适应协作的部分算法,如:基于角色潜力的自适应协作等,最后分享了论文中进行的实验,证明了自适应协作的稳定性和高效性。

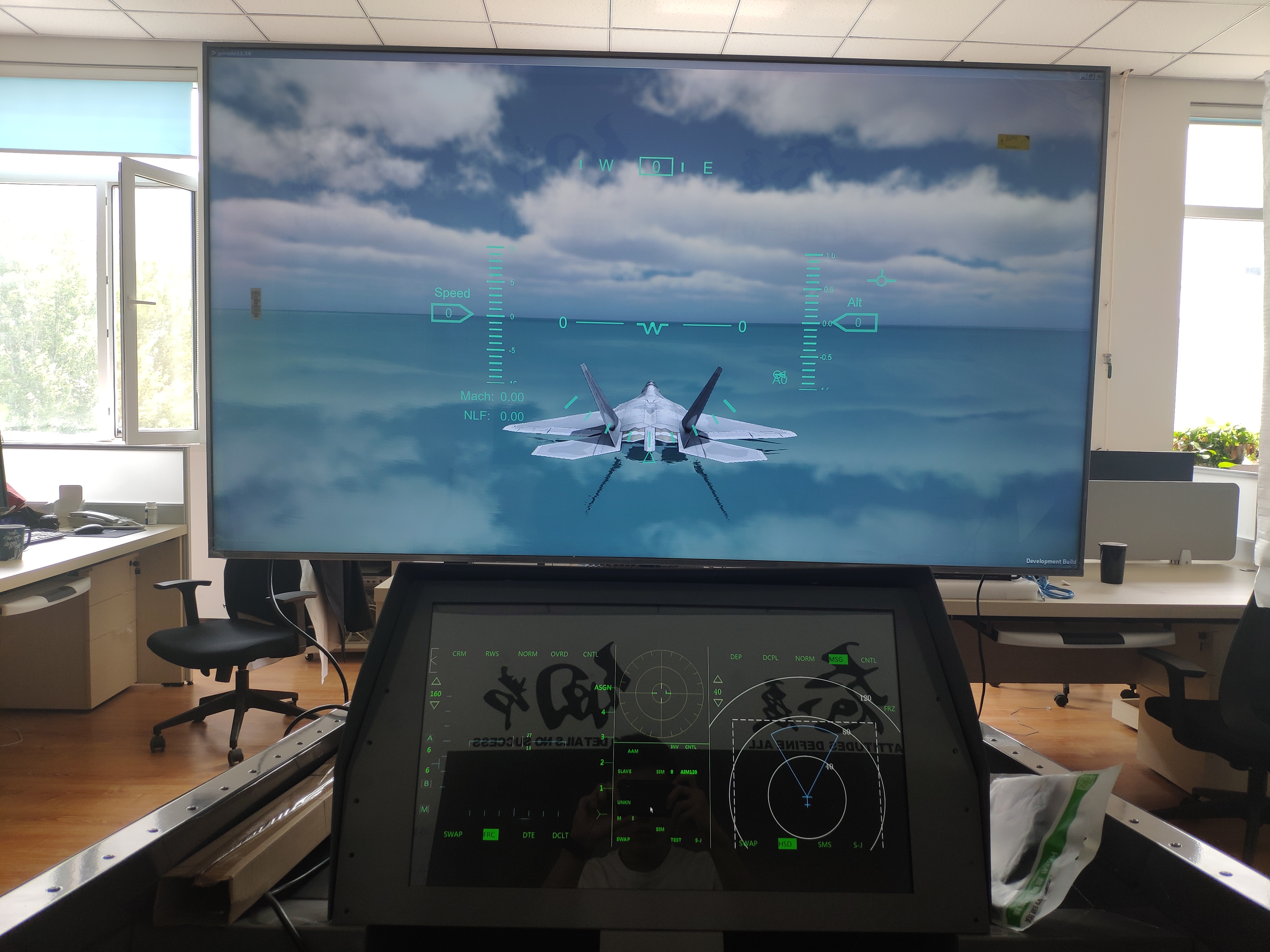
孙悦同学汇报的题目为“基于RBC的消防无人机”,她的汇报以RBC为底层方法论和E-CARGO为模型,提出了一种基于导师制度下的多智能体协作方法(MM-TCP),用来解决多台消防无人机高效完成救援的问题。汇报参考的论文将无人机划分成“导师”无人机和“新手”无人机,并引入生长曲线来模拟救援过程中两种无人机的资格变化情况。最后通过不同的实验验证了MM-TCP方法的可行性及有效性。
孙入川同学的汇报题目为“系统可靠性分析”,该同学首先对无人机公共安全做背景解读,引出无人机系统可靠性分析必要性,随后介绍传统可靠性分析的几种方法,最后通过解读一篇最新论文详细地介绍了多种方法的融合应用。
田松同学的汇报题目为“基于区间2型模糊神经网络的全向移动机器人自适应补偿控制”,该同学从研究背景与意义,运动学和动力学模型,区间型-2模糊神经网络自适应,轨迹控制器,仿真和实验结果五个方面进行汇报,他表示研究对象是四麦克轮的小车,研究问题是如何消除或补偿摩擦、外界干扰、建模不准确等造成的不确定性,提高轨迹跟踪精度,最后通过仿真对比实验验证了该方法的可行性,相对于其他方法提高了轨迹的跟踪精度。
各位同学汇报结束后,其他在场同学与指导老师积极发言提问问题,学术氛围浓郁。王传云老师表示,全方位移动机器人目前还存在一些未完善的地方,针对不同环境和场景,需要做适应性更强的优化和改进,例如极端温度环境等。此外机器人与人类的互动和交流方面仍有待加强,需要更好地理解人类的意图,增强交互灵活性。另外,机器人主体的可靠性和安全性也是一个重要的挑战,需要提高机器人在导航、控制、动力等方面的可靠性,并确保机器人操作过程中的安全性。最后能源管理再生利用必须被考虑,提高其续航能力、能源利用率以及降低能量消耗才能更符合未来的环保要求。

此次学术交流汇报倡导研究生自发、自愿、自觉参与其中来。研究生既可以结合相关课程开展学术交流,也可以根据自身研究方向开展学术讨论,把参与学术交流活动变成一种经常性的专业活动,以此推动广大研究生同学深入学习本专业的知识,提升专业的应用和创新能力,营造学生学术讨论氛围,培养和提升学生学术思维和学术习惯,以达到推动学术交流,培养科学精神,提升科研能力的目的。